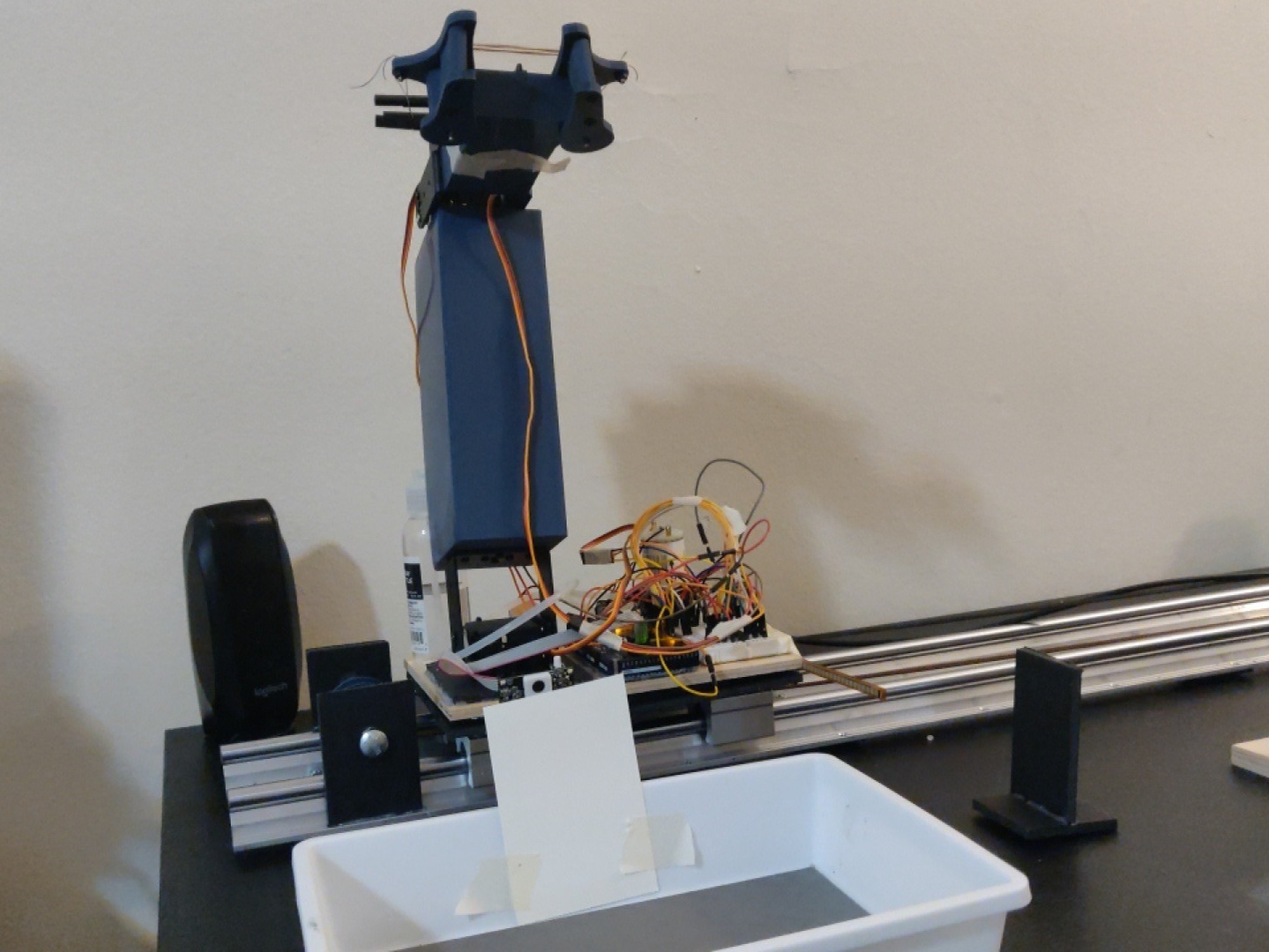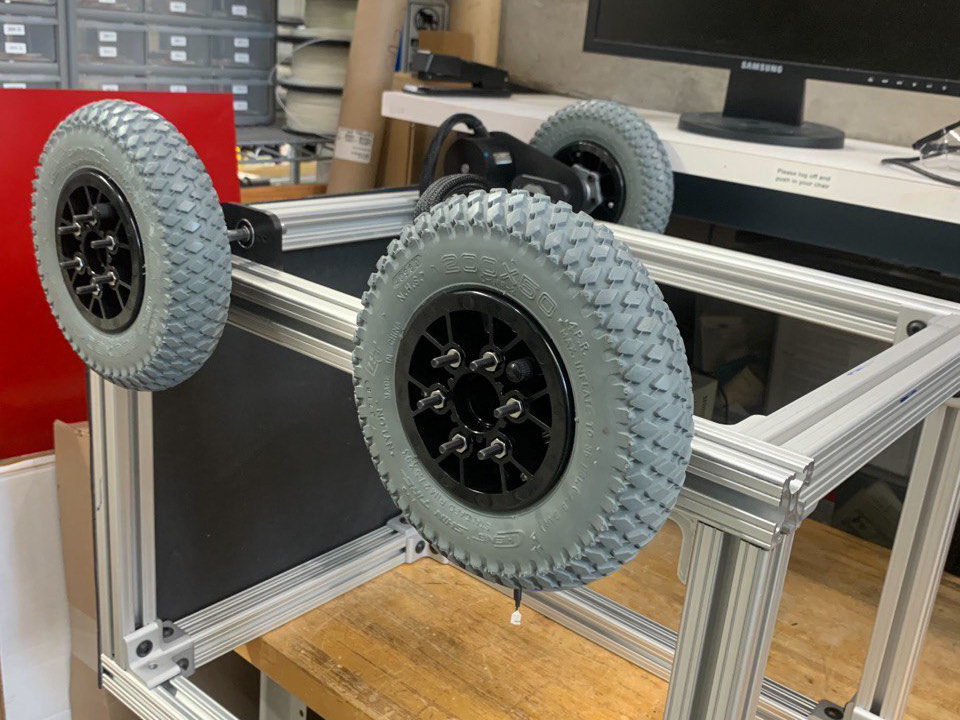
My team developed the idea of a low-latency haptic device that could render a 3x3 force input into five motors capable of rendering walls and points across a surface.
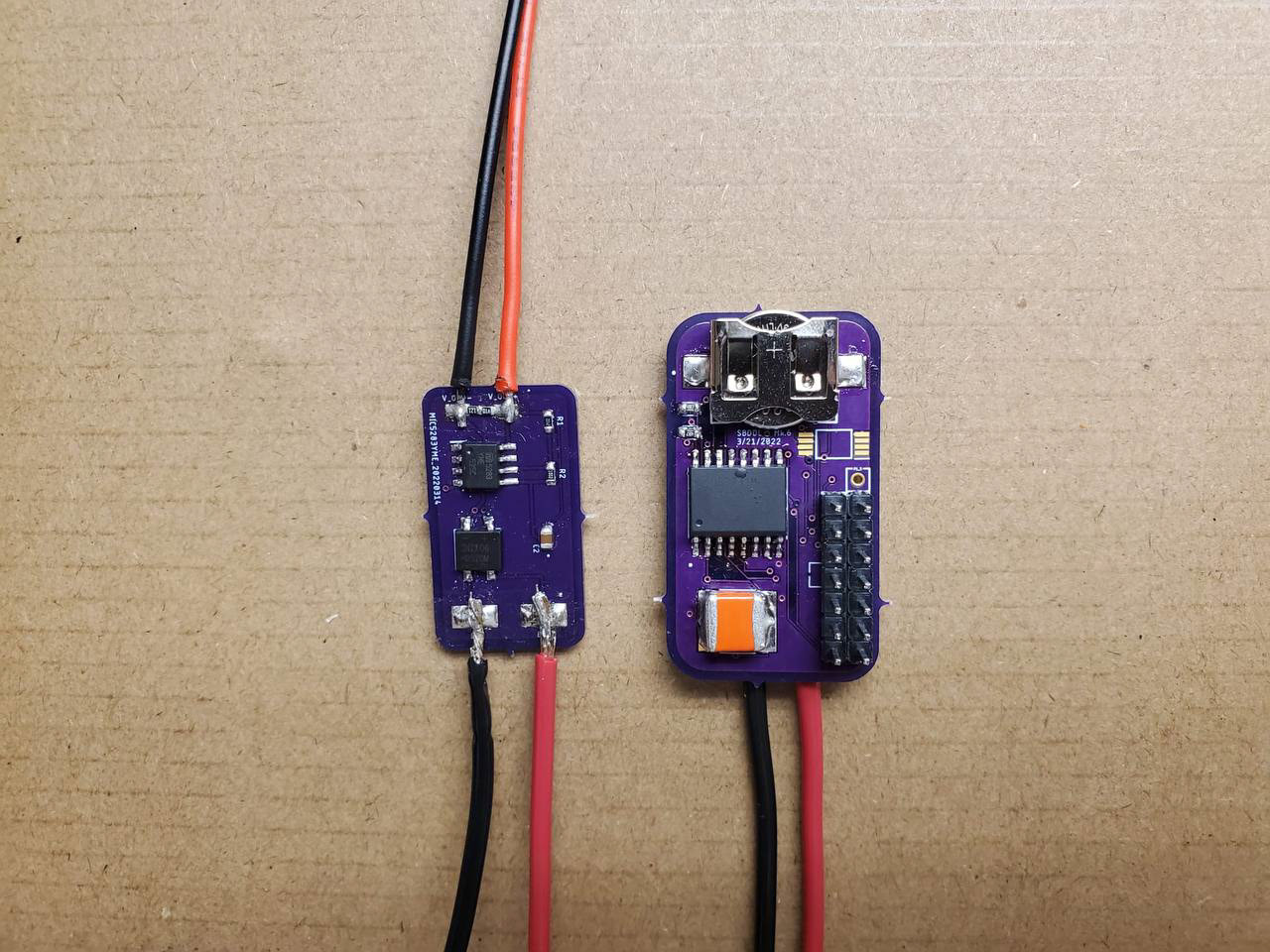
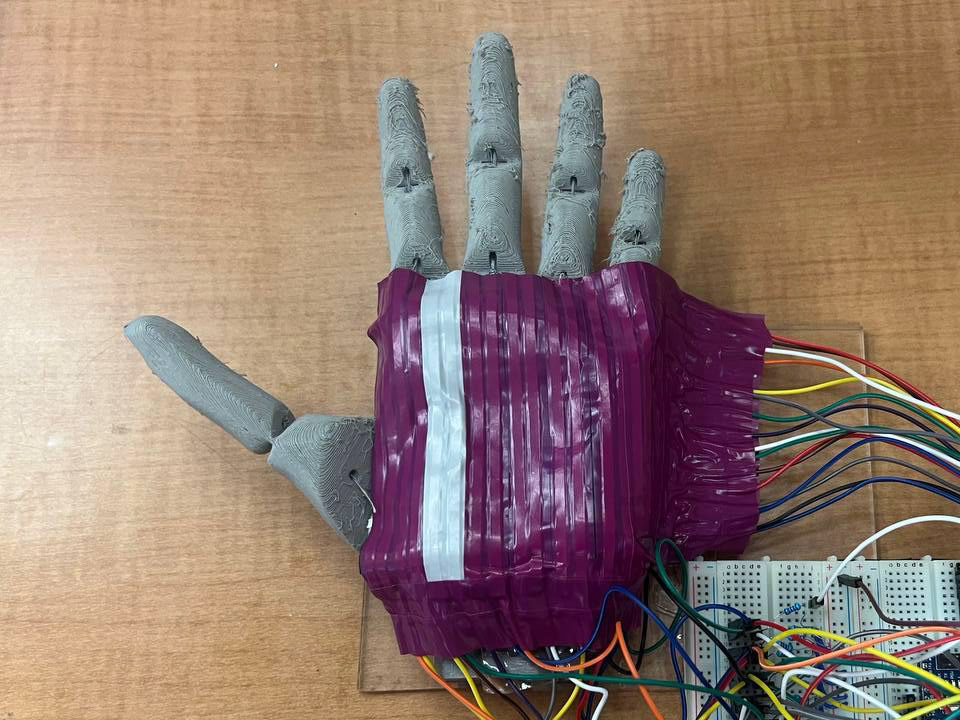
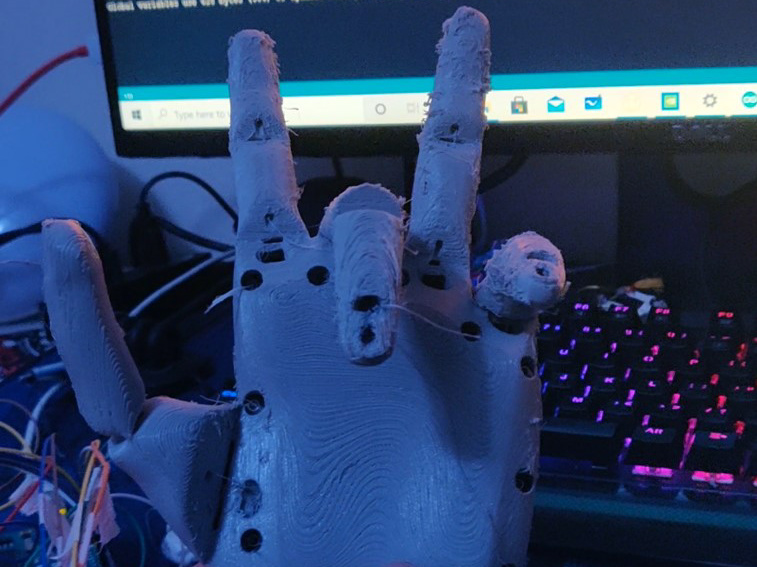
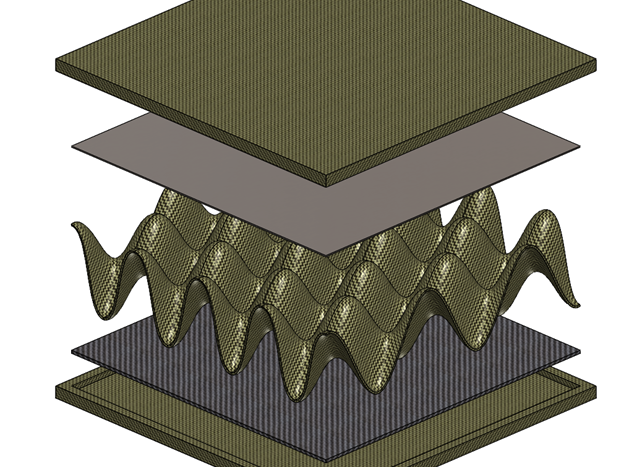
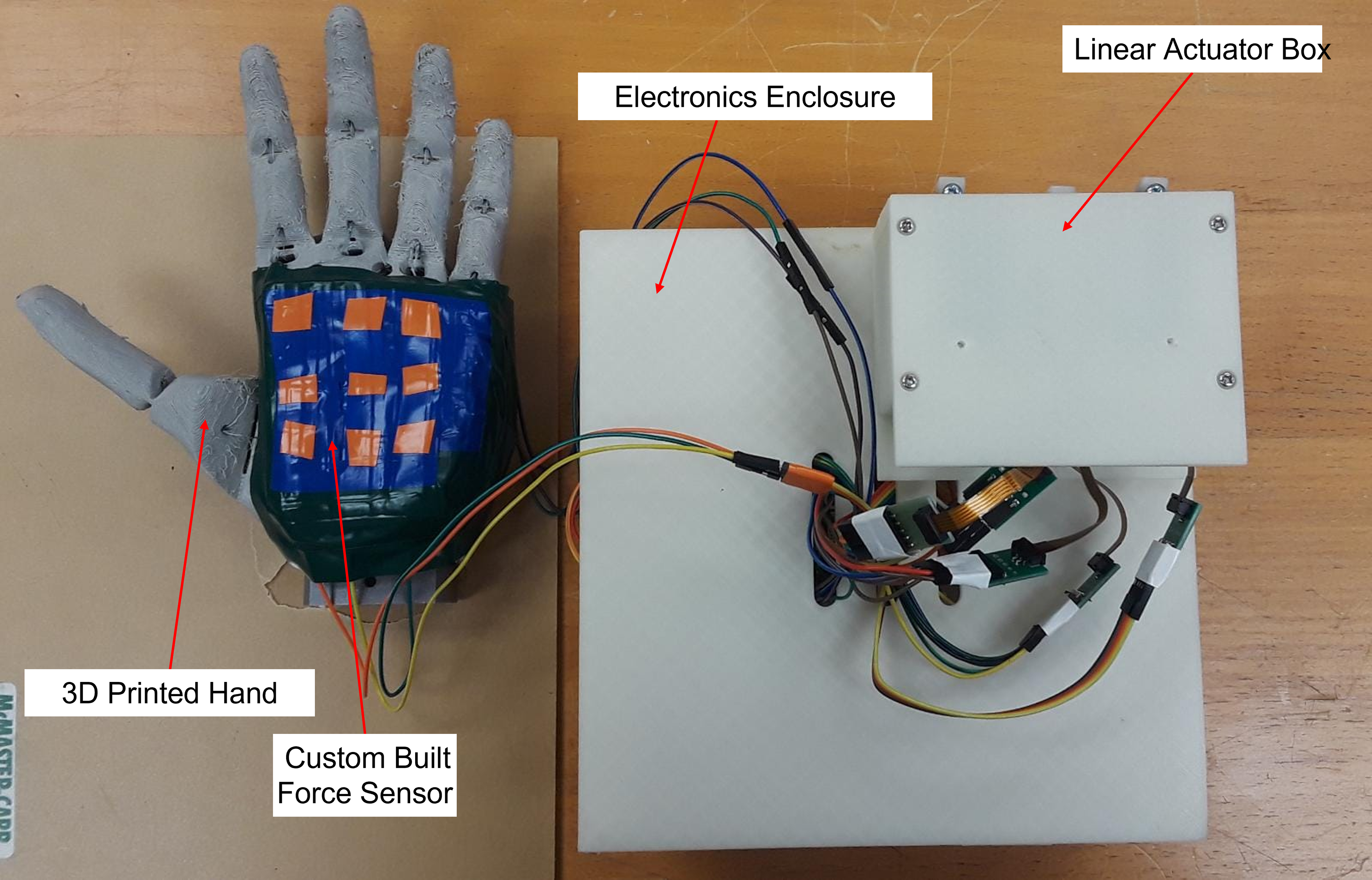
I conceptualized, fabricated, and programmed an innovative piezoresistive custom force sensor that can operate on non-uniform surfaces with advanced multitouch capabilities.
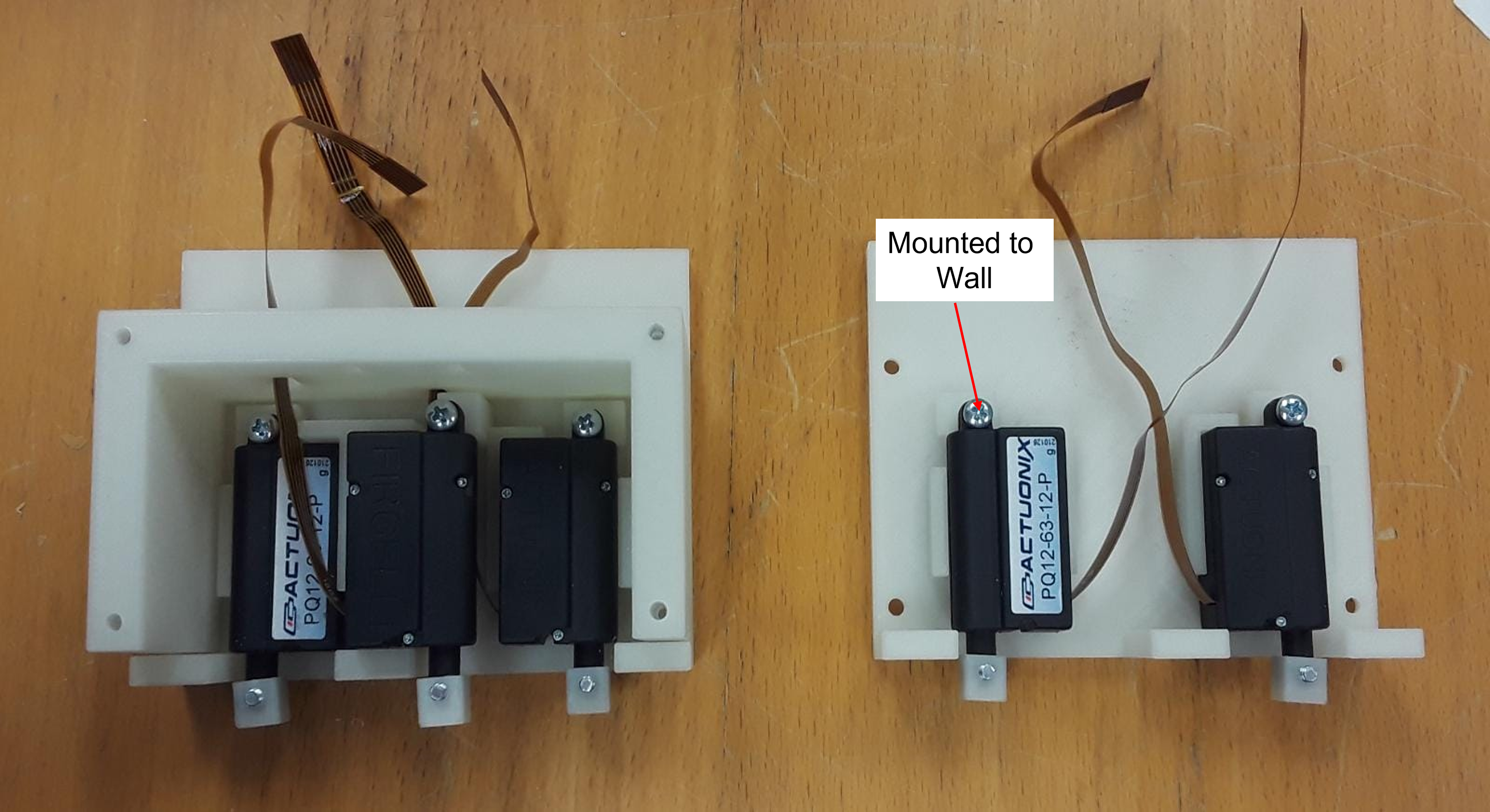
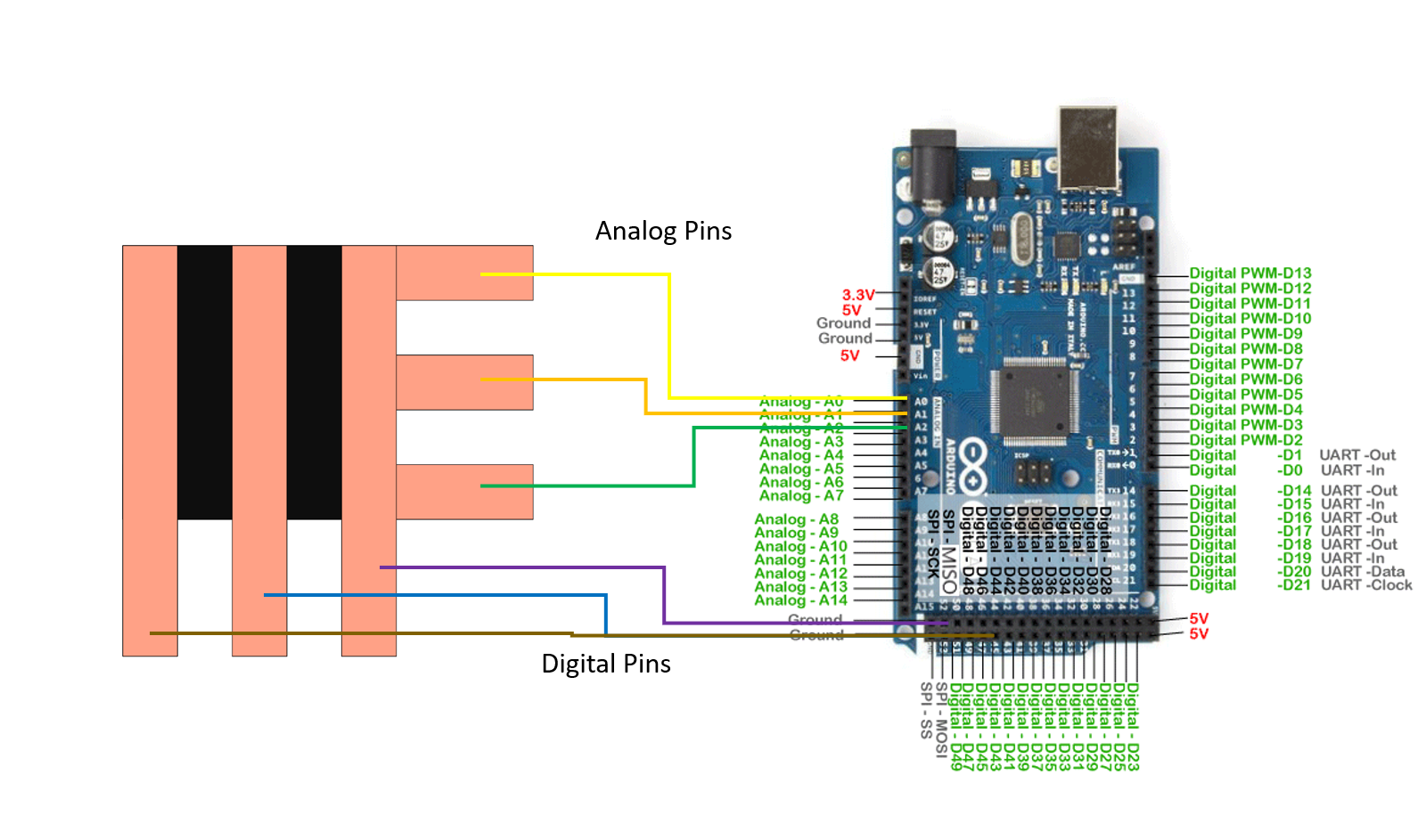
I successfully integrated the flexible force sensor with a motor array to provide low-latency haptic feedback. A PID controller was utilized to ensure a fast motor response. The piezoresistive sensor consisted of a three-by-three array that was mapped to five linear actuators.
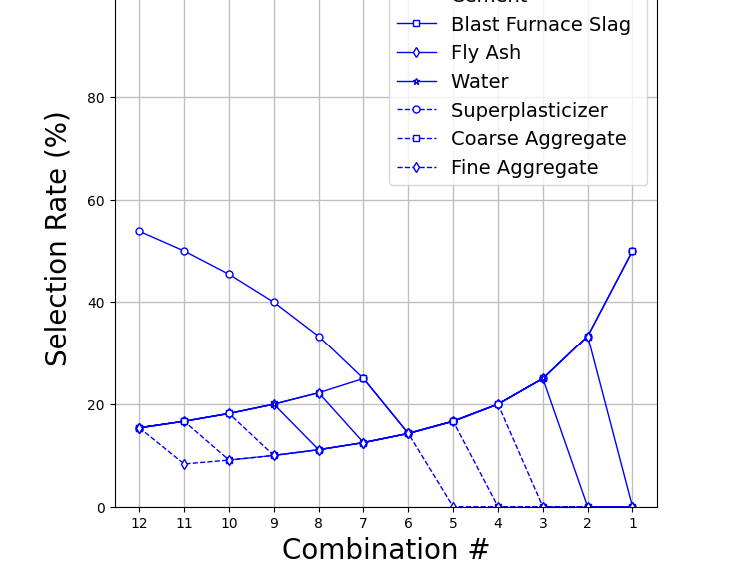
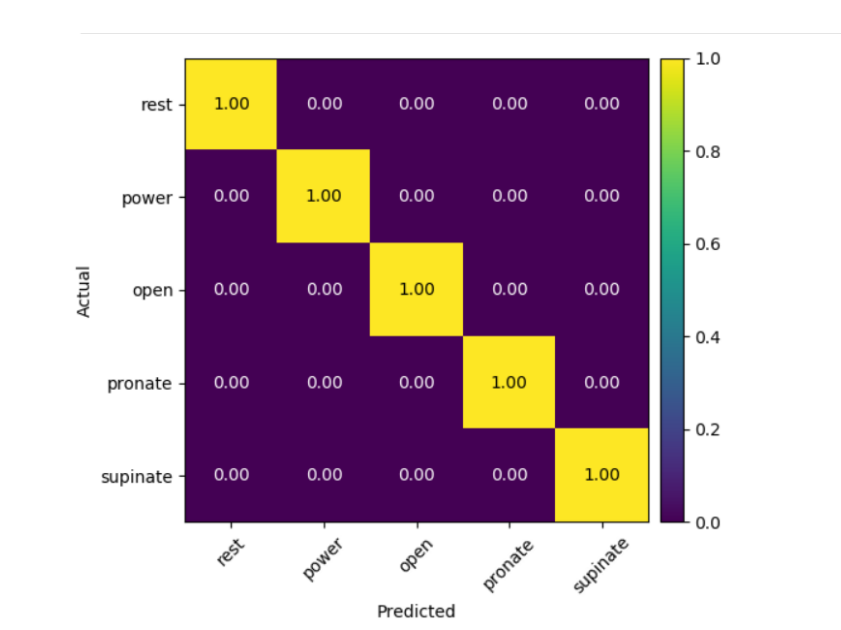
To enhance the accuracy of the motor array's output, I applied machine learning techniques such as LDA and SVM to extract features from the force sensor signal.
Testing the Performance of The Haptic System with Custom Force Sensors