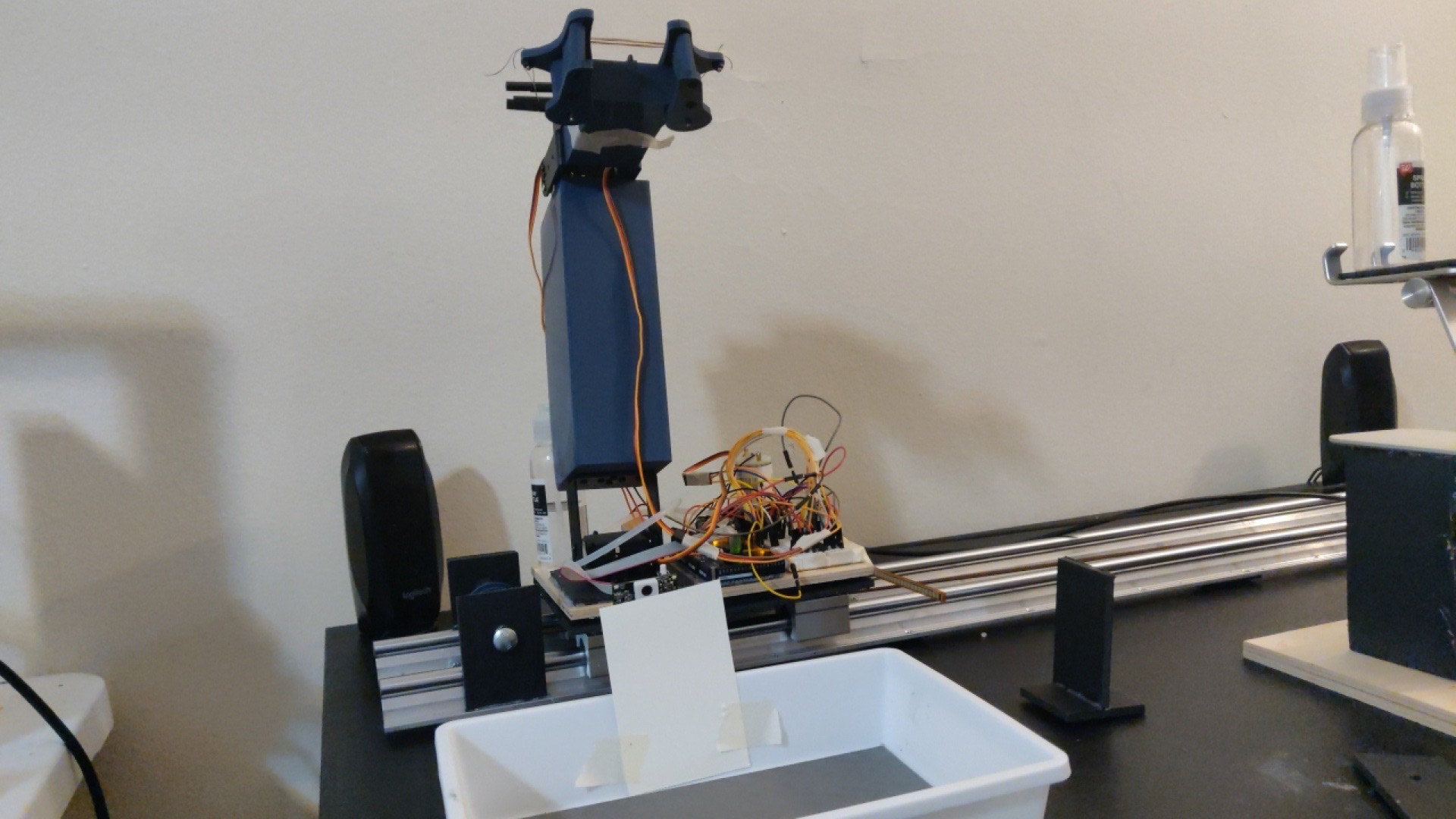

As a team, we worked to develop a robotic arm that could pick up COVID testing samples and deposit them in a secondary container in an automatic way. The system also has the ability to sanitize the pickup area and provides audio instructions.
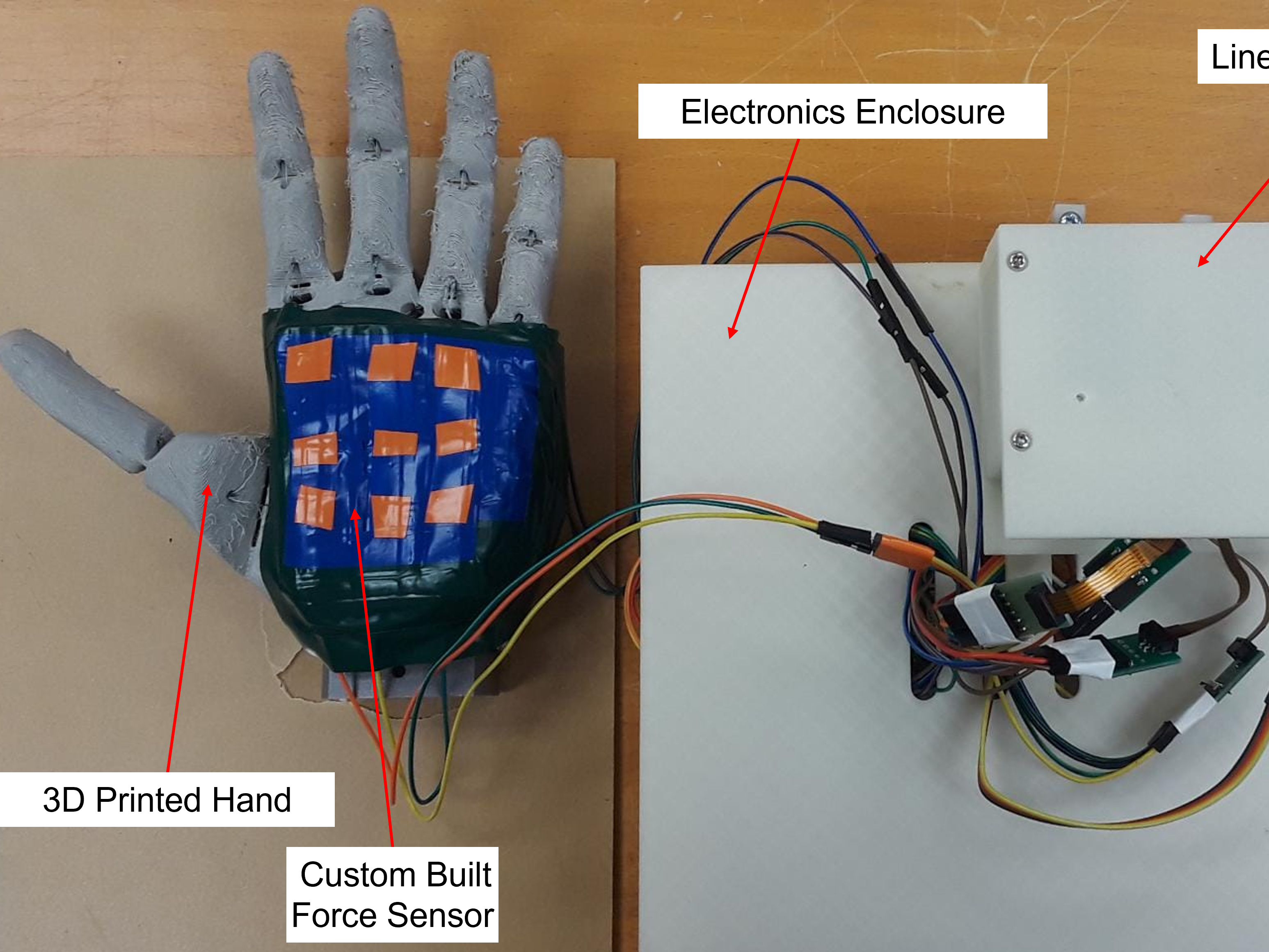
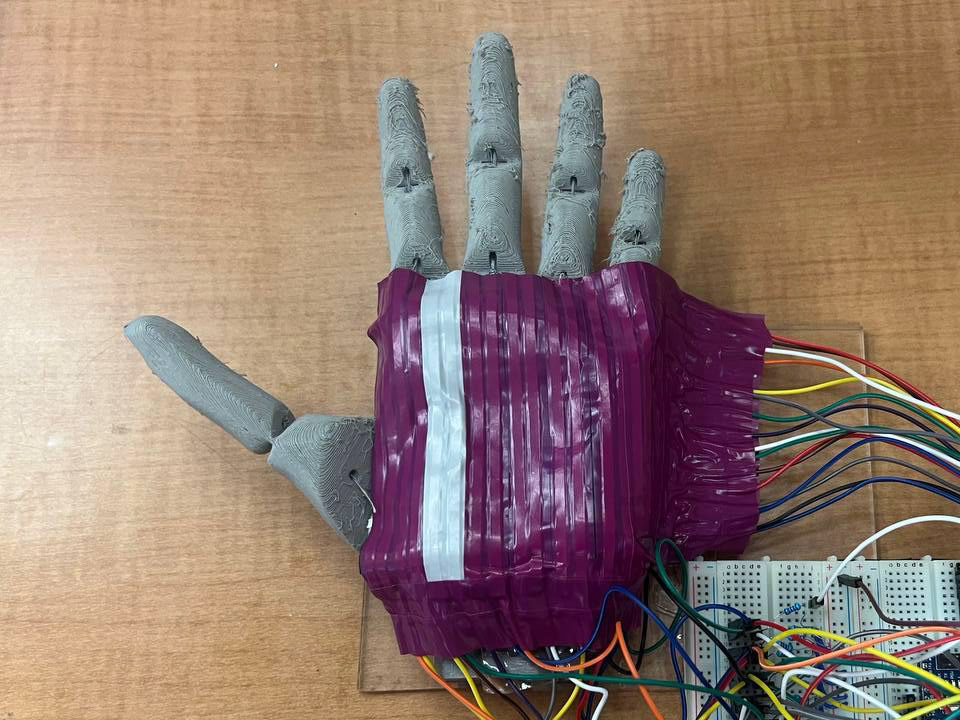
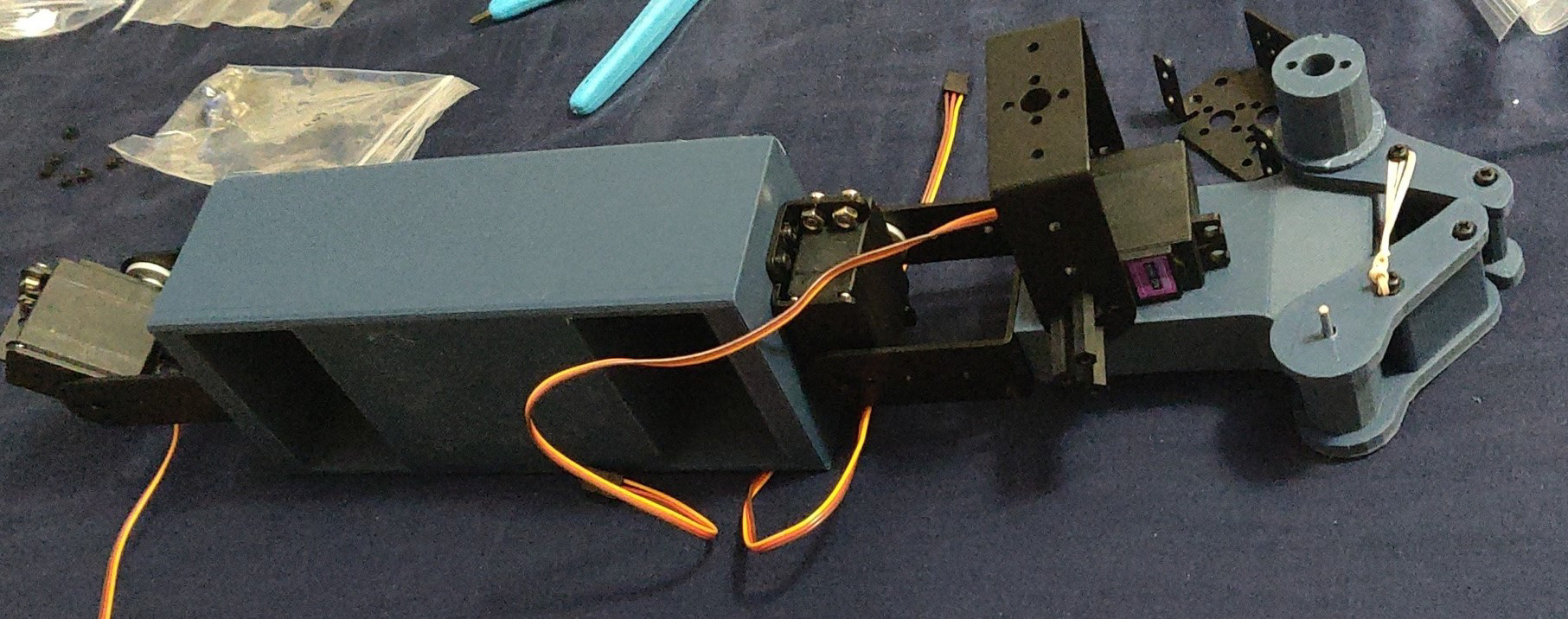
I worked on the design and manufacturing of the 3D-printed robotic arm and grip. The system was made with PLA, with an 8% infill to reduce its weight.
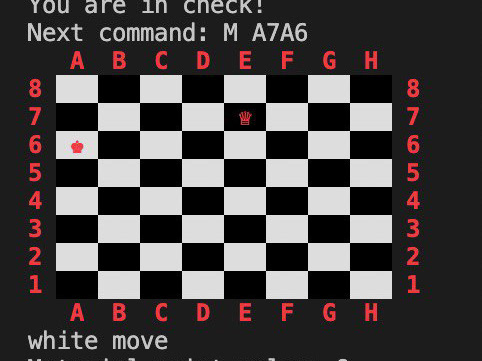
Additionally, I worked on implementing the audio cues that the system provides to users to ensure proper utilization.
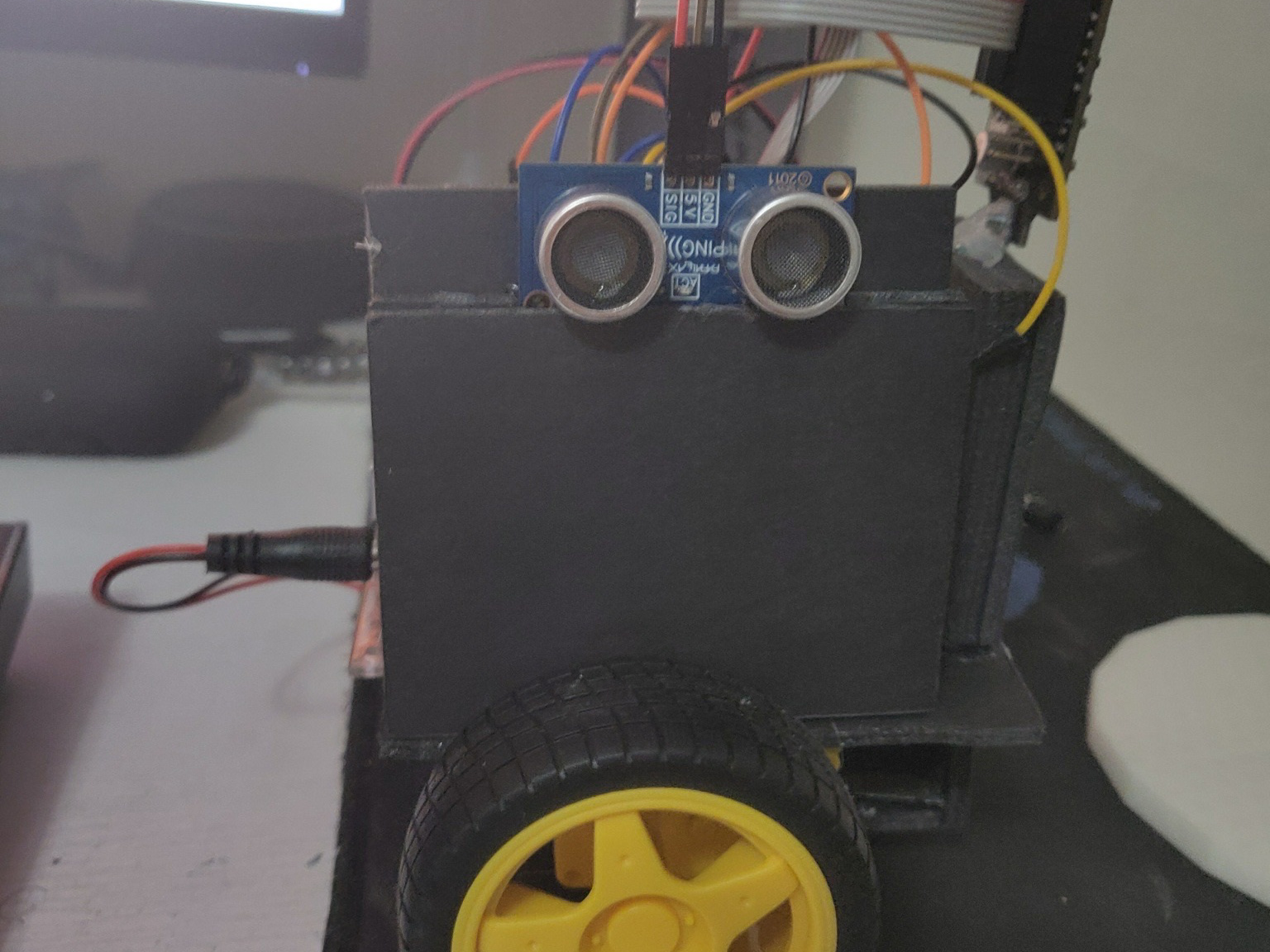
The system is mounted on rails with a limit switch and a pixie camera to detect tags. This allows the motor that drives the platform to know where to stop for picking up and dropping off the samples.
I assisted with the circuit design of the Arduino and servo motors, as well as the necessary code to run the system. A modular approach was used for coding the system. I was responsible for the audio, pick, and drop modules, and I also helped design the main code.
The system exhibits some issues related to the rail system due to a malfunctioning limit switch, which fails to stop the platform in the intended final location.
First Iteration of Robotic Covid Sample Collector